 Synthesizer
Synthesizer BLIT(Band Limited Impulse Train)による鋸波の生成(2)
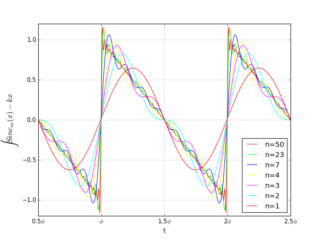
前回、BLITについて簡単に説明しました。要約しますと、 ・倍音成分をある周波数でカットした鋸波は、時間軸に沿ってBLITを積分すると生成できる。 ・BLITは、以下の数式で表される。 $$y(n) = (M/P) Sinc{_M}\\ \...
Synthesizer 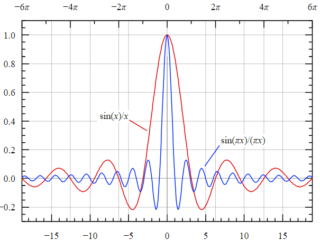 Synthesizer
Synthesizer 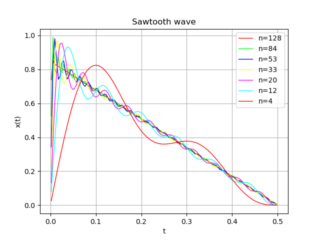 Synthesizer
Synthesizer 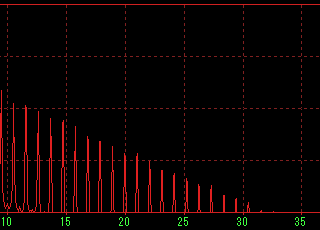 Synthesizer
Synthesizer  Synthesizer
Synthesizer  Synthesizer
Synthesizer  Synthesizer
Synthesizer  日記
日記  Synthesizer
Synthesizer  Synthesizer
Synthesizer  Synthesizer
Synthesizer  Synthesizer
Synthesizer  Synthesizer
Synthesizer  Synthesizer
Synthesizer