 STM32
STM32 NUCLEO-F767ZIを購入
STM32のボードは以前購入したNUCLEO-F401REを使っていましたが、結構楽しめることが分かったので、上のランクのCortex-M7ベースのボードを買ってみました。何種類かあるのですが、価格はどれも同じなので数字が一番大きいNUCL...
STM32  STM32
STM32  STM32
STM32  STM32
STM32  STM32
STM32 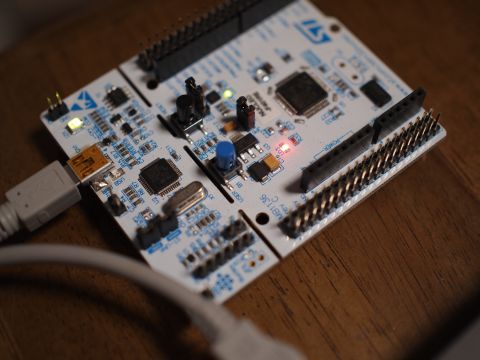 STM32
STM32