

ジェスチャ認識や音声認識をやらせたあと放置状態になっていたM5StickCですが、前から一度試してみたかった倒立振子を、以下の木楽らぼさんの作品をそのままトレースして動かしてみました。
M5StickC バランスロボ
M5StickC には加速度計、ジャイロスコープ、電池、などが入っており、 モーターとドライバを追加するだけで、倒立振子を作ることができました。 8月2日のM5Stackユーザーグループミーティングと8月3日4日のメーカーフェア東京で展示...
kirakulabo.blogspot.com
モーターを左右同じ極性で接続してしまったので、ソースコードはその部分(397行目の#ifdefを#ifndefにする)だけ修正しました。
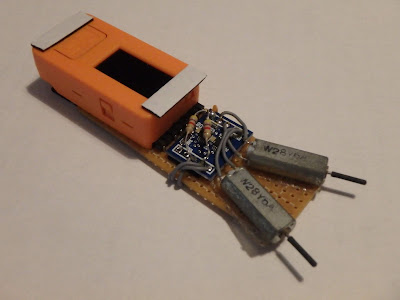
全体の配線はこんな感じです。(クリックで拡大します)
ユニバーサル基板は以前aitendoでケース付きで売られていたものです。
M5StickCはL字ピンヘッダ、モータードライバは1×5ピンソケット×2で接続しています。
モーターはオリジナルの手法どおり、100円ショップで買った両面テープで基板に貼り付けました。全体的に軽量なので、これで強度的には十分です。

手の上に載せてバランスを取ろうとしても全然無理なのに、マイコン制御だとちゃんと立って動いてくれるので感心してしまいます。
コメント